



Specifications
8-30 Series
36-126 Volts
215 x 115mm x 75mm
12v 1 Amp Max
Builds up to 100 mph
350 Battery Amps
700 /1000 Amps Max
5.5 LBS
Product Information
Replaced by Newer Version
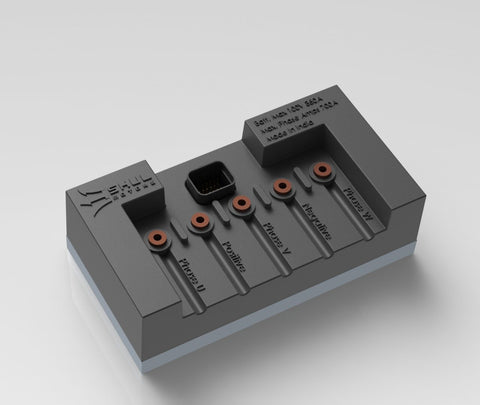
Comes with Ampseal Connector and 26 crimpable pins. If you want a harness added to your order, Click Here
Features:
- Field Weakening and MTPA (Maximum Torque Per Amp) are supported
- IMU for self balancing applications (Onewheel, EUC, Robotics)
- Plenty of CPU resources are left so you can make your apps for the controller
- Powered By STM32F4 microcontroller Running at 168MHZ
- Sensored and sensor-less FOC with auto-detection of all motor parameters
- Current and voltage measurement on all phases
- Variable Regenerative braking
- Brushless, brushed DC motors, IPM motors are supported
- A GUI that is easy on the eyes
- Adaptive PWM frequency to get as good ADC measurements as possible
- Good start-up torque in the sensor-less mode
- The motor is used as a tachometer, which is good for odometry
- Duty-cycle Control, Speed Control, Current Control and Position Control
- Seamless 4-quadrant operation
- Interface to control the motor: PPM signal (RC servo), analog, UART, I2C, USB or CAN-bus
- Consumed and regenerated amp-hour and watt-hour counting
- Optional PPM signal output. Useful when e.g., controlling an RC car from a raspberry pi or an android device
- The USB port uses the modem profile, so an Android device can be connected to the motor controller without rooting
- Adjustable protection against
- Low input voltage
- High input voltage
- High motor current
- High input current
- High regenerative braking current
- Rapid duty cycle changes (ramping)
- High RPM (separate limits for each direction).
- When the current limits are hit, a soft back-off strategy is used while the motor keeps running. If the current becomes way too high, the motor is switched off completely.
- The RPM limit also has a soft back-off strategy.
- Realtime Data logging and Monitoring.
Specifications:
- Size: 215x115x76mm. 8.5" x 4.52 x 3"
Voltage: 36-126 v (8-30s safe)) - Current: Continuous max 120A Battery, 300A Phase (Values depend on the mounting and ambient temperature around the device!)
- Support BLDC square wave mode control and FOC sine wave mode.
- Firmware: latest (firmware update supported)
- ERPM:150000
- Control Interface Ports: USB, CAN, UART, Bluetooth
- Supported Sensors: ABI, HALL, AS5047, AS5048A, Sensor-less
- Input Set Support: PPM, ADC, NRF, UART
- Circular Bus Bar Size: 10mm (Diameter)
- Gyroscope and Accelerometer (BMI160)
- Programmable: Yes
User Manuals, Firmware, Cad Files Click here
Please supply 5v to Bluetooth module input not 3.3 per manual
You must register your 3shul within 7 days of receiving your unit. First, create a user account here, then navigate to the warranty claim page if you have an issue.
3 Month Warranty on all 3shul products. See our warranty page for more info.
Download the newest version of VESC-TOOL: https://vesc-project.com/vesc_tool
For setup and resources:
https://www.youtube.com/watch?v=cal_N2W6OsE&t=150s
https://www.youtube.com/results?search_query=vesc+setup
https://vesc-project.com/forum
https://discord.com/invite/JgvV5NwYts
https://www.facebook.com/groups/electricskate/
https://www.facebook.com/groups/671947930216764
Based on Vesc by VESC®-Project. VESC is a registered TM, owned by Benjamin Vedder"
Why choose Alien Rides?
- ➔ Free Alien Rides sticker with every vehicle purchase.
- ➔ We are able to ship PEVs and parts internationally to keep you rolling.
- ➔ Our unique rides have competitve pricing, great value, and providing amazing fun.
- Choosing a selection results in a full page refresh.
- Press the space key then arrow keys to make a selection.
- Use left/right arrows to navigate the slideshow or swipe left/right if using a mobile device